Signaux aléatoires
Brefs rappels de probabilité
L’ensemble \(E\) doit être muni d’une tribu \(\mathcal{E}\) sur \(E\) afin de former un espace mesurable \((E, \mathcal{E})\).
Par exemple, pour une variable aléatoire réelle, \(E = \mathbb{R}\) et on peut définir \(\mathcal{E} = \mathcal{B}(\mathbb{R})\) la tribu borélienne : la plus petite tribu sur \(\mathbb{R}\) contenant tous les ensembles ouverts.
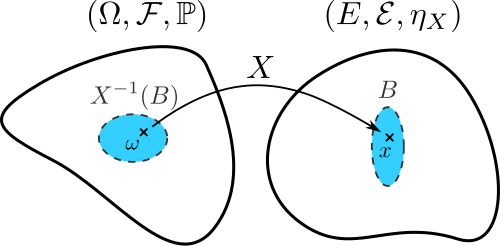
La variable aléatoire \(X\) est alors en réalité une fonction mesurable sur \((E, \mathcal{E})\), c’est-à-dire que pour tout sous-ensemble \(B\) de la tribu \(\mathcal{E}\), l’image réciproque \(X^{-1}(B) = \{\omega : X(\omega) \in B\}\) appartient à la tribu \(\mathcal{F}\) et donc on peut calculer la probabilité \(\mathbb{P}(X^{-1}(B))\) grâce à la mesure de probabilité \(\mathbb{P}\) définie sur \((\Omega, \mathcal{F})\).
- Cette définition permet de transposer l’aléa qui provient de \(\Omega\) dans l’espace \(E\).
- On souhaite maintenant également transposer la mesure de probabilité \(\mathbb{P}\) sur \(E\).
Loi de probabilité
On définit ainsi la probabilité que \(X\) prenne ses valeurs dans un sous-ensemble \(B\) de \(\mathcal{E}\) par :
\[ \mathbb{P}_{X}(B) := \mathbb{P}(X^{-1}(B)) = \mathbb{P}(\{\omega : X(\omega) \in B\}),\]
que l’on notera souvent plus simplement \(\mathbb{P}(X \in B)\).
\(\mathbb{P}_{X}\), appelée probabilité image de \(\mathbb{P}\) par \(X\), définit une mesure de probabilité sur \((E, \mathcal{E})\).
L’ensemble des probabilités \(\mathbb{P}_{X}(B)\) pour tous les sous-ensembles \(B\) de la tribu \(\mathcal{E}\) définit la distribution ou loi de probabilité de \(X\).