Signaux aléatoires
Modèles de signaux aléatoires
Bruit blanc gaussien
Un bruit blanc gaussien est un bruit blanc pour lequel toutes les variables \(X(t)\) sont i.i.d suivant une loi gaussienne.
On le note \(\{X(t)\}_{t \in \mathbb{Z}} \sim BBG(0, \sigma^2)\) ou encore \(\{X(t)\}_{t \in \mathbb{Z}} \overset{i.i.d}{\sim} \mathcal{N}(0, \sigma^2)\).

Bruit de quantification
On considère le dispositif de quantification qui associe à un signal continu \(x(t) \in \mathbb{R}\) le signal quantifié \[ Y(t) = k q \quad \text{si} \quad x(t) \in \left[ kq - \frac{q}{2} , kq + \frac{q}{2} \right[,\]
où \(q\) s’appelle le pas de quantification et \(k \in \mathbb{Z}\).

On peut alors réécrire le signal quantifié comme \(Y(t) = x(t) + W(t)\) où \(W(t)\) représente l’erreur appelée bruit de quantification.
On modélise en général ce bruit comme un processus aléatoire sous les hypothèses suivantes : \(\{W(t)\}_t\) est une suite de variables aléatoires décorrélées qui suivent une loi uniforme sur l’intervalle \([-q/2, q/2]\).
En utilisant l’expression de la densité de probabilité de la loi uniforme on montre que \(\mathbb{E}[W(t)] = 0\) et \(\mathbb{E}[W(t)^2] = q^2 / 12\) donc \(\{W(t)\}_t\) est un bruit blanc.
Signal périodique à amplitude et phase aléatoires

- Vous vous souvenez les voyelles du cours d’introduction ?
- On a l’impression de voir un motif périodique se répéter, mais avec une amplitude et une phase à l’origine aléatoires.
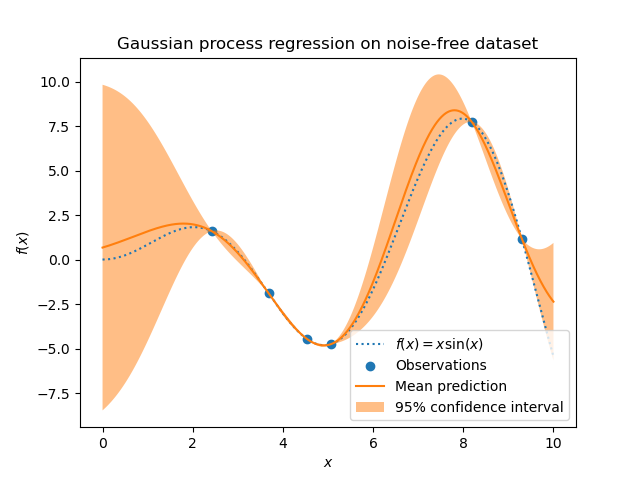
Processus gaussien pour la régression
Les processus gaussiens offrent un cadre probabiliste puissant pour les problèmes de régression, car ils permettent de modéliser non seulement la prédiction moyenne, mais aussi l’incertitude associée à chaque prédiction.
Processus gaussien pour la modélisation de la réverbération
En 1979, James Moorer, alors chercheur à l’IRCAM à Paris, remarqua que les réponses impulsionnelles des salles de concert « sonnent » comme un bruit blanc gaussien avec une enveloppe décroissant exponentiellement en temps. Il s’agit d’un processus gaussien non stationnaire.
On peut en effet invoquer le théorème central limite pour justifier qu’à partir d’une certaine densité d’échos qui se superposent, les coefficients de la réponse impulsionnelle de salle suivent une loi normale.
Cette technique, très simple et computationellement efficace, est toujours utilisée pour simuler la réverbération d’une salle, par exemple dans les contenus immersifs (RV, jeux vidéo, etc.) ou pour simuler des données d’entraînement de systèmes de traitement de la parole basés IA.


Annulation d’écho
- Dans certaines situations, comme par exemple en téléphonie main-libre, un haut-parleur se trouve à proximité d’un microphone.
- Le signal \(Y(t)\) en sortie du microphone contient donc le signal utile \(S(t)\) (la voix de la personne portant le téléphone) mais également un écho \(E(t)\) : \[ Y(t) = S(t) + E(t). \]
 Crédit image : Alango Technologies
Crédit image : Alango Technologies
Cet écho est issu d’un haut-parleur duquel est émis un signal \(X(t)\) (la voix de la personne à distance) qui se propage dans un canal acoustique représenté par un filtre linéaire de réponse impulsionnelle \(h(t)\) :
\[ E(t) = [h \star X](t). \]
On modélise \(S(t)\) et \(X(t)\) comme des processus aléatoire réels, centrés, SSL.